
ZDIN-Zahlen im Detail
Das umfangreiche ZDIN-Netzwerk aus Wissenschaft und Wirtschaft spannt sich über ganz Niedersachsen. Gemeinsam verzeichnen die Zukunftslabore und die Koordinierungsstelle beeindruckende Projekterfolge, die auf dieser Seite im Detail vorgestellt werden.
Wissenschaftliche Veröffentlichungen
Eine zentrale Herausforderung bei der Umsetzung von Model-based Systems Engineering ist die Sicherstellung der Modellkonsistenz. Um dieser Herausforderung zu begegnen, schlägt dieser Beitrag die Anwen ...
Eine zentrale Herausforderung bei der Umsetzung von Model-based Systems Engineering ist die Sicherstellung der Modellkonsistenz. Um dieser Herausforderung zu begegnen, schlägt dieser Beitrag die Anwendung von Konsistenzregeln vor. Hierzu werden einerseits notwendige Grundlagen, wie die Bewertung der Modellkonsistenz und andererseits die konkrete Formulierung von Konsistenzregeln betrachtet. Um eine strukturierte Formulierung zu ermöglichen, wurde eine Satzschablone entwickelt, welche insbesondere die Bewertung von Architekturmustern beinhaltet. Außerdem wurden entsprechend der Satzschablone konkrete Konsistenzregeln an einem heterogenen Modell beispielhaft angewendet.
Autor*innen
- M. Sc. Thomas Schumacher (Technische Universität Clausthal, Institut für Maschinenwesen)
- Prof. Dr.-Ing. David Inkermann (Technische Universität Clausthal, Lehrstuhl für Integrierte Produktentwicklung)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: Mitteilungen aus dem Institut für Maschinenwesen der Technischen Universität Clausthal Nr. 48
- Datum: 22.12.2023
Autonomous driving and interconnected cyber-physical traffic systems pose ever-increasing challenges for the development and validation of advanced driver assistance systems and autonomous driving fun ...
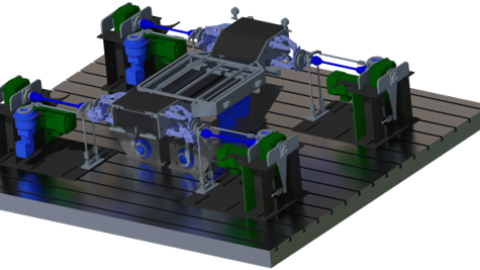
Autonomous driving and interconnected cyber-physical traffic systems pose ever-increasing challenges for the development and validation of advanced driver assistance systems and autonomous driving functions. In particular, real-time optimization and testing are related to enormous effort and risk. A holistic, flexibly configurable, real-time capable test bench for the entire vehicle remedy this situation. This test system must replicate both the road excitation and the networked traffic environment with sufficient accuracy. In addition, the sensory perceptions of the vehicle must be stimulated. The following paper therefore describes the concept of the holistic, highly flexibly configurable real-time test system for intelligent vehicles in cooperating cyber-physical traffic systems, called ERAGON.
Autor*innen
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
- M.Eng. Marian Göllner (Ostfalia Hochschule für angewandte Wissenschaften)
- Jie Zhang (Ostfalia Hochschule für angewandte Wissenschaften)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: 3rd International Conference on Computers and Automation
- Datum: 07.12.2023 - 09.12.2023
In this paper, a localization function for an autonomous vehicles (AV) is implemented in a cyber-physical laboratory test field. This function is adapted to the properties of the cyber-physical system ...
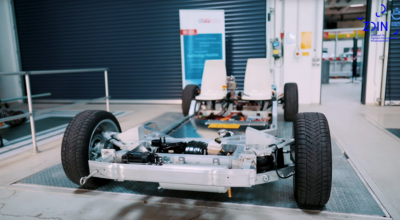
In this paper, a localization function for an autonomous vehicles (AV) is implemented in a cyber-physical laboratory test field. This function is adapted to the properties of the cyber-physical system and can be used in variety of projects of different domains, such as indoor road traffic simulation as well as in the context of Industry 4.0 applications. The great advantage of this feature is that the position of the AV platform can be determined in parallel by two different methods: a self-localization algorithm using sensors on the vehicle and through the sensor in the environment. These two data sources are transmitted via UDP in the CPS laboratory test field, which is used as the basis for the subsequent application (navigation).
Autor*innen
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- Li Taihao (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- M.Eng. Marian Göllner (Ostfalia Hochschule für angewandte Wissenschaften)
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
- Jie Zhang (Ostfalia Hochschule für angewandte Wissenschaften)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: 3rd International Conference on Computers and Automation
- Datum: 07.12.2023 - 09.12.2023
Autonomous driving and interconnected cyber-physical traffic systems pose ever-increasing challenges for the development and validation of advanced driver assistance systems and autonomous driving fun ...
Autonomous driving and interconnected cyber-physical traffic systems pose ever-increasing challenges for the development and validation of advanced driver assistance systems and autonomous driving functions. In particular, real-time optimization and testing are related to enormous effort and risk. A holistic, flexibly configurable, real-time capable test bench for the entire vehicle remedy this situation. This test system must replicate both the road excitation and the networked traffic environment with sufficient accuracy. In addition, the sensory perceptions of the vehicle must be stimulated. The following paper therefore describes the concept of the holistic, highly flexibly configurable real-time test system for intelligent vehicles in cooperating cyber-physical traffic systems, called ERAGON.
Autor*innen
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
- M.Eng. Marian Göllner (Ostfalia Hochschule für angewandte Wissenschaften)
- Jie Zhang (Ostfalia Hochschule für angewandte Wissenschaften)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: 3rd International Conference on Computers and Automation
- Datum: 07.12.2023 - 09.12.2023
Safety is critical for autonomous driving, and one aspect of improving safety is to accurately capture the uncertainties of the perception system, especially knowing the unknown. Different from only p ...
Safety is critical for autonomous driving, and one aspect of improving safety is to accurately capture the uncertainties of the perception system, especially knowing the unknown. Different from only providing deterministic or probabilistic results, e.g., probabilistic object detection, that only provide partial information for the perception scenario, we propose a complete probabilistic model named GevBEV. It interprets the 2D driving space as a probabilistic Bird’s Eye View (BEV) map with point-based spatial Gaussian distributions, from which one can draw evidence as the parameters for the categorical Dirichlet distribution of any new sample point in the continuous driving space. The experimental results show that GevBEV not only provides more reliable uncertainty quantification but also outperforms the previous works on the benchmarks OPV2V and V2V4Real of BEV map interpretation for cooperative perception in simulated and real-world driving scenarios, respectively. A critical factor in cooperative perception is the data transmission size through the communication channels. GevBEV helps reduce communication overhead by selecting only the most important information to share from the learned uncertainty, reducing the average information communicated by 87% with only a slight performance drop.
Autor*innen
- Prof. Dr.-Ing. habil. Monika Sester (Leibniz Universität Hannover)
- Dr.-Ing Hao Cheng (Leibniz Universität Hannover)
- M.Sc. Yunshuang Yuan
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: ISPRS Journal of Photogrammetry and Remote Sensing
- Datum: 01.12.2023 - 01.12.2023
Wissenschaftliche Vorträge
Referent*innen
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
Vortrag
- Im Rahmen der Veranstaltung: ACI Mobility Wolfsburg
- Datum: 12.12.2023
Referent*innen
- Li Taihao (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
Vortrag
- Im Rahmen der Veranstaltung: 3rd International Conference on Computers and Automation
- Datum: 08.12.2023
Referent*innen
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
Vortrag
- Im Rahmen der Veranstaltung: 3rd International Conference on Computers and Automation
- Datum: 08.12.2023
Referent*innen
- Jan Niklas Gremmel (Technische Universität Braunschweig)
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
Vortrag
- Im Rahmen der Veranstaltung: Dissertantenwerkstatt Braunschweig
- Datum: 01.12.2023
Referent*innen
- Awad Mukbil (Technische Universität Clausthal, Institut für Informatik)
- Prof. Dr.-Ing. Jörg P. Müller (Technische Universität Clausthal, Institut für Informatik)
Vortrag
- Im Rahmen der Veranstaltung: im Rahmen der IEEE intelligent transportation systems conference 2023
- Datum: 26.09.2023
Außerwissenschaftliche Beiträge
Referent*innen
- Joachim Axmann (Technische Universität Braunschweig)
- M. Sc. Lars Everding (Technische Universität Braunschweig, Institut für Konstruktionstechnik)
- M.Sc. Volkan Kizgin (Technische Universität Braunschweig, Institut für Konstruktionstechnik)
- Dipl.-Ing. Björn Krüger (Technische Universität Braunschweig, Institut für Konstruktionstechnik)
Beitrag
- Anlass: Webinarreihe im Rahmen des Transformation Hubs TASTE
- Datum: 24.11.2023 - 24.11.2023
Referent*innen
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
- M.Eng. Marian Göllner (Ostfalia Hochschule für angewandte Wissenschaften)
Beitrag
- Anlass: Austausch mit potenziellen Projektpartnern
- Datum: 02.11.2023 - 02.11.2023
Referent*innen
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
- M.Eng. Marian Göllner (Ostfalia Hochschule für angewandte Wissenschaften)
Beitrag
- Anlass: Informationsveranstaltung für studierende der Fakultät Maschinenbau
- Datum: 26.10.2023 - 26.10.2023
Referent*innen
- Prof. Dr.-Ing. habil. Monika Sester (Leibniz Universität Hannover)
Beitrag
- Anlass: TechnikSalon Aufhof Hannover
- Datum: 19.10.2023 - 19.10.2023
Referent*innen
- Prof. Dr.-Ing. habil. Monika Sester (Leibniz Universität Hannover)
Beitrag
- Anlass: Verkehrswissenschaftliches Kolloquium, TU Dresden
- Datum: 17.10.2023 - 17.10.2023
Messebeiträge
Vorstellung des entwickelten Simulation Game SYSTEMIC auf dem Tag des Systems Engineering (TdSE) durch das Institut für Maschinenwesen der TU Clausthal.
Zielstellung des Simulation Games ist die Vermittlung von Grundwissen im Bereich Systems Engineering. Dabei werden die Themenfelder Anforderungs- und Architekturentwicklung, Subsystementwicklung und Implementierung, Integration und Verifikation sowie Projekt- und Risikomanagement adressiert. Zielstellung ist es, das Zusammenwirken bzw. die Abhängigkeiten zwischen Prozessen, Methoden, Werkzeugen und der Organisation in den genannten Themenfeldern zu vermitteln. Außerdem ermöglicht das Spiel die Interaktion (Kommunikation und Entscheidungsfindung) verschiedener Entwicklungsbereiche zu simulieren.
Beteiligte ZDIN-Einrichtungen
- Technische Universität Clausthal
Beitrag
- Art des Beitrags: Exponat
- Datum: 15.11.2023
- Ort: Würzburg
Vorstellung des entwickelten Simulation Game SYSTEMIC auf der ICED23 durch das Institut für Maschinenwesen der TU Clausthal.
Zielstellung des Simulation Games ist die Vermittlung von Grundwissen im Bereich Systems Engineering. Dabei werden die Themenfelder Anforderungs- und Architekturentwicklung, Subsystementwicklung und Implementierung, Integration und Verifikation sowie Projekt- und Risikomanagement adressiert. Zielstellung ist es, das Zusammenwirken bzw. die Abhängigkeiten zwischen Prozessen, Methoden, Werkzeugen und der Organisation in den genannten Themenfeldern zu vermitteln. Außerdem ermöglicht das Spiel die Interaktion (Kommunikation und Entscheidungsfindung) verschiedener Entwicklungsbereiche zu simulieren.
Beteiligte ZDIN-Einrichtungen
- Technische Universität Clausthal
Beitrag
- Art des Beitrags: Exponat
- Datum: 27.07.2023
- Ort: Bordeaux
Das DLR Institut für Verkehrssystemtechnik hat auf der Hannover Messe das Testfeld Niedersachsen und die GAIA-X-Projekte optimal in Szene gesetzt: Am DLR-Stand konnten Besucher*innen durch die HoloLens den Verkehr auf der A39 virtuell und live beobachten und mit einem Klick die Perspektive bzw. den Mast mit der Erfassungstechnik wechseln. Außerdem wurde mit einer Demo auf dem Außengelände gezeigt, wie Betriebsbereiche für das automatisierte Fahren mittels Simulation effizient geprüft werden können. Zudem wurden die Projekte aus der GAIA-X 4 Future Mobility-Familie am Stand der Automotive Agentur Niedersachsen zusammen mit dem Institut für KI-Sicherheit den Besuchern nahe gebracht.
Beteiligte ZDIN-Einrichtungen
- Deutsches Zentrum für Luft- und Raumfahrt (DLR)
- Institut für Verkehrssystemtechnik (Braunschweig)
Beitrag
- Art des Beitrags: Demonstratoren
- Datum: 17.04.2023
- Ort: Hannover
Technologiedemonstratoren



Transfer-Workshops
Den Besuchern der ACIMobility (https://aci-mobility.de/ ) wurden beispielhafte Labore vorgestellt mit denen Innovationen im Verkehrssystem der Zukunft bis hin zum automatischen Fahren ermöglicht werden können. Schwerpunkt war dabei die Rolle der Labore als Enabler für ausrollbare Lösungen sowie technologische Hintergründe dazu.
Workshop
- Datum: 14.12.2023
- Ort: DLR Institut für Verkehrssystemtechnik Braunschweig
Gemeinsam mit der Stadt Braunschweig, der TU Braunschweig sowie der PTB wurde eine Informationsveranstaltung für die Parlamentarier des deutschen Bundestages unter dem Titel: "Future Mobility - autonom und digital" mit Vorträgen und Exponaten organisiert und durchgeführt.
Durch das gemeinsam mit den Akteuren gewählte Leitmotto: „Automatisierte und Vernetzte Mobilität in der Region Braunschweig mit seinen Verbindungen aus Wissenschaft, Wirtschaft und staatliche Institutionen ist Wegbereiter für Innovationen in digitalisierten und vernetzten Mobilitätswelten“ sowie den entsprechend Demonstratoren aus Simulation und Konzeptfahrzeugen wurde den etwa 200 Gästen die Leistungsfähigkeit des regionalen Forschungs- und Wirtschaftsverbundes erfolgreich nahegebracht. Leitende Vorträge von ZLM Partnern und aus Politik rundeten den Rahmen ab.
Siehe u.a. auch: https://www.braunschweig.de/po...
Workshop
- Datum: 30.11.2023
- Ort: Niedersächsische Landesvertretung Berlin
Im Workshop "Methods for Trustworthy Autonomous Systems as Multi- and Interdisciplinary Challenge" haben die am Zukunftslabor Mobilität beteiligten Forschungsgruppen der Universität Oldenburg und des DLR in breitem interdisziplinären Kontext mit Informatiker*innen, Mathematiker*innen, Jurist*innen, Ethiker*innen und Psycholog*innen die Herausforderungen des Entwurfs autonomer Systeme und der technischen Zusicherung, psychologischen Wahrnehmung und juristischen Behandlung ihrer Systemzuverlässigkeit und -sicherheit erörtert. Zielsetzung war die Skizzierung einer interdisziplinären Forschungsagenda.
Workshop
- Datum: 30.05.2023
- Ort: DLR-Institut für Systems Engineering für zukünftige Mobilität
Vortrag im Rahmen der Volkswagen Akademie, innerbetriebliche Weiterbildung
Workshop
- Datum: 22.03.2023
- Ort: Berlin
Neben einer erfolgreichen Darstellung der Forschungen am DLR wurde der Workshop zur Netzwerkbildung und auch zur Weiterentwicklung von Ideen für zukünftige Verbesserungen der Simulatoren und das Sammeln weiterer relevanter Forschungsfragen genutzt.
Workshop
- Datum: 21.02.2023
- Ort: Braunschweig
Fort- und Weiterbildungen
- Prof. Dr.-Ing. David Inkermann (Technische Universität Clausthal, Lehrstuhl für Integrierte Produktentwicklung)
- Angebotsart: Seminar
- Datum: 12.12.2023
- Prof. Dr.-Ing. David Inkermann (Technische Universität Clausthal, Lehrstuhl für Integrierte Produktentwicklung)
- Angebotsart: Seminar
- Datum: 05.12.2023
- Prof. Dr.-Ing. Marcus Baum (Georg-August-Universität Göttingen, Institut für Informatik)
- Angebotsart: Workshop
- Datum: 27.11.2023
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- Angebotsart: Workshop
- Datum: 24.10.2023
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
- Angebotsart: Workshop
- Datum: 10.10.2023
Studienabschlussarbeiten
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
- Art: Master
- Themencluster: Mobilitätsdienstleistungen
- Datum: 02.12.2023 - 02.05.2024
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
- Art: Master
- Themencluster: Mobilitätsdienstleistungen
- Datum: 01.12.2023 - 01.06.2024
- Prof. Dr.-Ing. Jörg P. Müller (Technische Universität Clausthal, Institut für Informatik)
- Art: Master
- Themencluster: Mobilitätsdienstleistungen
- Datum: 01.12.2023 - 27.05.2024
- Dipl.-Ing. Filip Vysoudil (Technische Universität Braunschweig, Institut für Konstruktionstechnik)
- M. Eng. A. Petia Krasteva (Technische Universität Braunschweig)
- Art: Studienarbeit (min. 14 Credits)
- Themencluster: Circular Economy
- Datum: 15.11.2023 - 15.02.2024
- Prof. Dr.-Ing. Jörg P. Müller (Technische Universität Clausthal, Institut für Informatik)
- Art: Master
- Themencluster: Modellierung und Simulation
- Datum: 14.11.2023 - 13.05.2024