
ZDIN-Zahlen im Detail
Das umfangreiche ZDIN-Netzwerk aus Wissenschaft und Wirtschaft spannt sich über ganz Niedersachsen. Gemeinsam verzeichnen die Zukunftslabore und die Koordinierungsstelle beeindruckende Projekterfolge, die auf dieser Seite im Detail vorgestellt werden.
Wissenschaftliche Veröffentlichungen
Die effiziente Interaktion verschiedener Entwicklungsdisziplinen und die Vermeidung von Modellinkonsistenzen stellen zentrale Herausforderungen innerhalb heutiger Systementwicklungen dar. Um bei diese ...
Die effiziente Interaktion verschiedener Entwicklungsdisziplinen und die Vermeidung von Modellinkonsistenzen stellen zentrale Herausforderungen innerhalb heutiger Systementwicklungen dar. Um bei dieser Herausforderung zu unterstützen, erläutert dieser Beitrag die Anwendung heterogener Modelle im Model-based Systems Engineering. Hierzu wird ein technisches Konzept zur Erzeugung digitaler, heterogener Modelle vorgestellt. Kernelement dieses Beitrags ist die Einführung eines beabsichtigten Bewertungsvorgehens, um den Nutzen heterogener Modelle initial zu evaluieren.
Autor*innen
- M. Sc. Thomas Schumacher (Technische Universität Clausthal, Institut für Maschinenwesen)
- Prof. Dr.-Ing. David Inkermann (Technische Universität Clausthal, Lehrstuhl für Integrierte Produktentwicklung)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: Mitteilungen aus dem Institut für Maschinenwesen der Technischen Universität Clausthal Nr. 49
- Datum: 16.12.2024
- Link zur Veröffentlichung
Die zunehmende Komplexität von mechatronischen Systemen erfordert einen strukturierten und systematischen Ansatz bei der Entwicklung, wodurch die Bedeutung von Rapid Control Prototyping (RCP) als wich ...
Die zunehmende Komplexität von mechatronischen Systemen erfordert einen strukturierten und systematischen Ansatz bei der Entwicklung, wodurch die Bedeutung von Rapid Control Prototyping (RCP) als wichtige Methodik hervorgehoben wird. Herkömmliche Computer Aided Engineering (CAE) Plattformen sind oft zu teuer, weshalb an der Ostfalia die preisgünstigere Alternative LoRra entwickelt wurde. Die LoRra-Modellbibliothek unterstützt den gesamten RCP-Entwicklungsprozess durch robustes Datenmanagement, erweitertes Versions- und Konfigurationsmanagement sowie eine hierarchische Organisation der Modelle und Mehrbenutzerzugriff. Dadurch werden konsistente und nachvollziehbare Entwicklungsprozesse gefördert, was die Wiederverwendbarkeit und Zuverlässigkeit von Entwicklungsartefakten verbessert und die Einführung von RCP-Methoden für kleine und mittlere Unternehmen (KMU) erleichtert. Dieses Papier diskutiert das Design, die Funktionalität und die Implementierungsstrategien der LoRra-Bibliothek und zeigt ihr Potenzial für die Zukunft der Entwicklung mechatronischer Systeme auf, indem sie verbesserte Zugänglichkeit und systematische Verwaltung ermöglicht.
Autor*innen
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
- Jie Zhang (Ostfalia Hochschule für angewandte Wissenschaften)
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: Simulation Notes Europe
- Datum: 01.12.2024
Autonomes Fahren und vernetzte cyber-physische Verkehrssysteme stellen die Entwicklung und Validierung fortschrittlicher Fahrerassistenzsysteme und autonomer Fahrfunktionen vor immer größere Herausfor ...
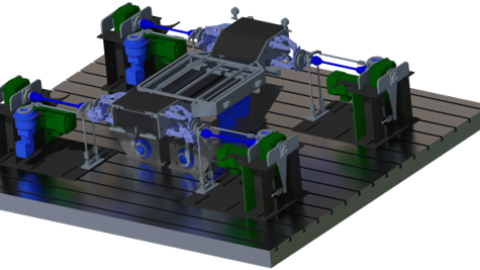
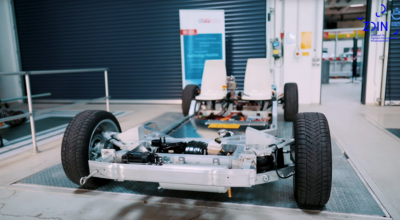
Autonomes Fahren und vernetzte cyber-physische Verkehrssysteme stellen die Entwicklung und Validierung fortschrittlicher Fahrerassistenzsysteme und autonomer Fahrfunktionen vor immer größere Herausforderungen. Insbesondere die Optimierung und Erprobung in Echtzeit ist mit einem enormen Aufwand und Risiko verbunden. Ein ganzheitlicher, flexibel konfigurierbarer, echtzeitfähiger Prüfstand für das Gesamtfahrzeug würde hier Abhilfe schaffen. Der folgende Beitrag beschreibt das Konzept des ganzheitlichen, hochflexibel konfigurierbaren Echtzeit-Testsystems für intelligente Fahrzeuge in kooperierenden cyber-physischen Verkehrssystemen (ERAGON), das derzeit an der Ostfalia Hochschule für angewandte Wissenschaften entwickelt wird.
Autor*innen
- Prof. Dr.-Ing. Xiaobo Liu-Henke (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
- M.Eng. Marian Göllner (Ostfalia Hochschule für angewandte Wissenschaften)
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
- Jie Zhang (Ostfalia Hochschule für angewandte Wissenschaften)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: Simulation Notes Europe
- Datum: 01.12.2024
- Link zur Veröffentlichung
Verkehrssimulationen werden für die Planung sicherer Routen für selbstfahrende Autos und für die Analyse von Verkehrssituationen in einem bestimmten Gebiet benötigt. Herkömmliche überwachte Lernmethod ...
Verkehrssimulationen werden für die Planung sicherer Routen für selbstfahrende Autos und für die Analyse von Verkehrssituationen in einem bestimmten Gebiet benötigt. Herkömmliche überwachte Lernmethoden für Fahrzeug-, Fahrrad- und Fußgängerverkehrsmodelle haben mehrere Einschränkungen, wie z. B. Driftfehler und schwache Verallgemeinerung auf neue Szenarien. Verstärkungslernen kann diese Probleme angehen, konvergiert aber aufgrund der großen Zustands- und Aktionsräume im realen Verkehr viel langsamer. Um diese Herausforderung zu überwinden, wird in dieser Arbeit eine hybride Methodik entwickelt, die überwachtes Lernen für kurzfristige Agenten-Kinematik und Verstärkungslernen für langfristige Trajektorienplanung kombiniert und dann an zwei verschiedenen heterogenen Verkehrsdatensätzen getestet: 1) InD-Datensatz von Kreuzungen und 2) UniD-Datensatz von Shared Space Verkehr. Die Ergebnisse zeigen die Effektivität dieser Methode, da sie die Basismodelle des überwachten Lernens in Bezug auf geringere durchschnittliche Verschiebungsfehler, eine höhere Erfolgsrate und eine längere Überlebenszeit der simulierten Agenten übertrifft. Darüber hinaus wurde die Verallgemeinerbarkeit dieses Ansatzes demonstriert, indem er sowohl für den regulären Kreuzungsverkehr als auch für den Verkehr im gemeinsamen Raum getestet wurde. Dieser Ansatz kombiniert die Vorteile der Fähigkeit des überwachten Lernens, komplizierte Systeme wie Fahrzeugkinematik zu erlernen, mit dem Potenzial des verstärkten Lernens für langfristige Planung in realen Verkehrssituationen (Code und Videodemonstrationen: https://github.com/engyasin/SLRL).
Autor*innen
- Yasin Yousif (Technische Universität Clausthal)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: Conference: International Conference on Practical Applications of Agents and Multi-Agent SystemsAt: Spain
- Datum: 19.11.2024 - 19.11.2024
- Link zur Veröffentlichung
Das Imitationslernen zielt darauf ab, Agenten durch die Beobachtung von Expertendemonstrationen die gewünschten Verhaltensweisen beizubringen. Dieser Ansatz kann auf Multi-Agenten-Umgebungen verallgem ...
Das Imitationslernen zielt darauf ab, Agenten durch die Beobachtung von Expertendemonstrationen die gewünschten Verhaltensweisen beizubringen. Dieser Ansatz kann auf Multi-Agenten-Umgebungen verallgemeinert werden, in denen es möglich ist, durch den Einsatz spezieller Belohnungen ein für beide Seiten vorteilhaftes politisches Gleichgewicht zu erreichen. Eine solche Belohnungsstruktur kann durch die Verwendung zentraler Belohnungen für kooperative Agenten und dezentraler Belohnungen für nicht-kooperative Agenten umgesetzt werden. In gemischten Multi-Agenten-Umgebungen, die sowohl kooperative als auch kompetitive Agenten enthalten, ist es jedoch notwendig, einen nuancierteren Ansatz für die Belohnungszuweisung zu entwickeln. In solchen Situationen kann ein Teil der Belohnung unter allen kooperativen Agenten aufgeteilt werden, während ein anderer Teil für jeden einzelnen Agenten bestimmt ist. Um diese Herausforderung zu meistern, schlagen wir in unserer Arbeit ein neuartiges Zwei-Komponenten-Belohnungsmodell für jeden Agenten vor: eine zentralisierte gemeinsame Komponente und eine dezentralisierte agentenspezifische Komponente. Wir haben mehrere Experimente mit drei verschiedenen Umgebungen durchgeführt, um die Leistung des vorgeschlagenen Modells im Vergleich zu seinen einzelnen Komponenten zu bewerten. Unsere Ergebnisse zeigen, dass das kombinierte Modell in gemischten Umgebungen besser abschneidet als alle seine Bestandteile. Es imitiert effektiv die zentralisierte Belohnung für kooperative Umgebungen, zeigt aber keine Verbesserung in kompetitiven Umgebungen. Schließlich haben wir die Transparenz unseres Modells anhand repräsentativer Beispiele und der skalaren Gewichtung der zentralen und dezentralen Komponenten innerhalb des kombinierten Modells getestet (Code verfügbar unter: https://github.com/engyasin/Adaptive_learning_4_MAIL).
Autor*innen
- Yasin Yousif (Technische Universität Clausthal)
- Prof. Dr.-Ing. Jörg P. Müller (Technische Universität Clausthal, Institut für Informatik)
Veröffentlichung
- Im Rahmen des Buches/Journals bzw. Konferenz: Conference: International Conference on Practical Applications of Agents and Multi-Agent SystemsAt: Spain
- Datum: 19.11.2024 - 19.11.2024
- Link zur Veröffentlichung
Wissenschaftliche Vorträge
Referent*innen
- Dr. Sebastian Feuerstack (OFFIS Institut für Informatik, FuE-Bereich Verkehr)
Vortrag
- Im Rahmen der Veranstaltung: Mit M. Sc. Jannis Daubner. DVWG-Forum 2024.
- Datum: 06.12.2024
Referent*innen
- Li Taihao (Ostfalia Hochschule für angewandte Wissenschaften, Fachgruppe Regelungstechnik und Fahrzeugmechatronik)
Vortrag
- Im Rahmen der Veranstaltung: IEEE International Symposium on Systems Engineering (ISSE)
- Datum: 17.10.2024
Referent*innen
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
Vortrag
- Im Rahmen der Veranstaltung: IEEE International Symposium on Systems Engineering (ISSE)
- Datum: 17.10.2024
Referent*innen
- Sven Jacobitz (Ostfalia Hochschule für angewandte Wissenschaften)
Vortrag
- Im Rahmen der Veranstaltung: IEEE International Symposium on Systems Engineering (ISSE)
- Datum: 16.10.2024
Referent*innen
- Dr. Sebastian Feuerstack (OFFIS Institut für Informatik, FuE-Bereich Verkehr)
Vortrag
- Im Rahmen der Veranstaltung: Legal and Operational Considerations for Autonomous Maritime Systems
- Datum: 16.09.2024
Außerwissenschaftliche Beiträge
Referent*innen
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
Beitrag
- Anlass: Transformationstalk im Eintracht-Stadion, Braunschweig
- Datum: 28.11.2024 - 28.11.2024
Referent*innen
- Prof. Dr.-Ing. Axel Hahn (Deutsches Zentrum für Luft- und Raumfahrt (DLR))
Beitrag
- Anlass: IALA Council 80
- Datum: 24.06.2024 - 28.06.2024
Referent*innen
- Jan Niklas Gremmel (Technische Universität Braunschweig)
Beitrag
- Anlass: TRANSFINALE im Rahmen der Transfernale – Innovationsfestival SüdOstNiedersachsen
- Datum: 13.06.2024
Referent*innen
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
Beitrag
- Anlass: Vortrag auf der Transfinale in Wolfsburg
- Datum: 13.06.2024 - 13.06.2024
Referent*innen
- Prof. Dr.-Ing. habil. Monika Sester (Leibniz Universität Hannover)
Beitrag
- Anlass: ESG-Symposium der NORD/LB
- Datum: 12.06.2024 - 12.06.2024
Messebeiträge
Weitere Ergebnisse des CRF3 zu einem zukünftigen Schiffsverkehrs in einem neuen digitalen grünen Zeitalter wurden in den maritimen Demonstrator integriert und auf der Weltleitmesse der maritimen Wirtschaft "SMM – Shipbuilding, Machinery and Marine Technology trade fair" zwischen dem 03.09.24 und dem 06.09.24 ausgestellt. Hierbei konnten die Ergebnisse einem Fachpuplikum und der Politik vorgestellt und diskutiert werden. Der Fokus wurde insbesondere auf ein zukünftiges maritimes Verkehrsmanagement für die Entwicklung und Realisierung eines Next-Gen-VTS gelegt.
Beteiligte ZDIN-Einrichtungen
- Deutsches Zentrum für Luft- und Raumfahrt (DLR)
- Institut Systems Engineering für zukünftige Mobilität (Oldenburg)
Beitrag
- Art des Beitrags: Demonstratoren
- Datum: 03.09.2024
- Ort: Hamburg
Autonomes Fahren ist in aller Munde und keine Zukunftsmusik mehr. Der Workshop „DEEP DRIVING - KI kennenlernen, erleben & verstehen“ vermittelte leicht verständlich und im praktischen Kontext, wie Deep-Learning basiertes autonomes Fahren funktioniert. Im Workshop konnten sowohl vorangemeldete als auch spontane Teilnehmer*innen spannende Einblicke in das Thema „Deep Driving“ erhalten und erste Erfahrungen sammeln.
Beteiligte ZDIN-Einrichtungen
- Technische Universität Clausthal
- Institute for Software and Systems Engineering
- Ostfalia Hochschule für angewandte Wissenschaften
Beitrag
- Art des Beitrags: Workshop
- Datum: 08.06.2024
- Ort: Hannover
Die ersten Ergebnisse zu einem zukünftigen Schiffsverkehr in einem neuen digitalen grünen Zeitalter wurden in einen maritimen Demonstrator integriert und auf dem „4th International Symposium MARISSA 2024: Maritime Safety and Security Applications“ ausgestellt. Hierbei konnten die Ergebnisse einem Fachpuplikum und der Politik, unter anderem dem Koordinator der Bundesregierung für die Maritime Wirtschaft und Tourismus, vorgestellt und diskutiert werden. Der Fokus wurde insbesondere auf ein zukünftiges maritimes Verkehrsmanagement für die Entwicklung und Realisierung eines Next-Gen-VTS zur maritimen Verkehrsbeobachtung und -steuerung gelegt. Ziel des intelligenten Verkehrsmanagement ist es, den Schiffsverkehr leichter, effizienter, nachhaltiger und sicherer zu gestalten, indem Ressourcen, wie Treibstoff und räumliche Kapazitäten, optimal genutzt werden. Darunter zählt auch die Ermöglichung eines Just-In-Time-Arrivals, also die Ankunft eines Schiffes am Zielhafen ohne Wartezeiten, um Treibstoff einsparen und Emissionen reduzieren zu können. Die Basis des ausgestellten Szenarios berücksichtigte dabei eine reale historische Schiffsroute mit Wartezeiten. Diese wird durch die Nutzung des Ansatzes der Verkehrsoptimierung angepasst und entsprechende Handlungsempfehlungen ausgegeben. Auf dem Demonstrator konnten dann beide Varianten, die ursprüngliche und die optimierte Route, auf der Seekarte dargestellt werden. Dadurch war ein direkter Vergleich möglich und die Auswirkungen und Potenziale zukünftiger Entwicklungen deutlich. Grundlage für diese initiale Konzeptionierung bildeten die Ergebnisse der Szenarioerstellung und Anforderungsableitung zur Erreichung dieser aus dem CRF 3, die im Laufe des Projektes kontinuierlich angepasst wurden.
Beteiligte ZDIN-Einrichtungen
- Deutsches Zentrum für Luft- und Raumfahrt (DLR)
- Institut Systems Engineering für zukünftige Mobilität (Oldenburg)
Beitrag
- Art des Beitrags: Demonstratoren
- Datum: 04.06.2024
- Ort: Bremerhaven
Mobilität der Zukunft – Einige Herausforderungen für die Mobilitätswirtschaft
Die Mobilitätsbedarfe verändern sich und mit ihnen die Anforderungen an die Mobilitätsträger und die Infrastruktur(en) u.a. im Hinblick auf Flexibilität, Zuverlässigkeit, Wirtschaftlichkeit, Energieeffizienz und Umweltverträglichkeit. Durch die zunehmende Digitalisierung in den letzten Jahren kommen neue Lösungsansätze und Geschäftsmodelle beispielsweise durch neuartige automatisierte und vernetzte Fahrzeugsysteme und -funktionen in Frage. Die IT-Fortschritte ermöglichen ein komplettes Überdenken des gesamten Mobilitätssystem mit allen zugehörigen Teilsystemen wie bspw. das Fahrzeug.
Beteiligte ZDIN-Einrichtungen
- Technische Universität Braunschweig
- Institut für Konstruktionstechnik
Beitrag
- Art des Beitrags: Vortrag
- Datum: 25.04.2024
- Ort: Hannover
5GAPS ist ein Projekt zur Entwicklung einer offenen Innovationsplattform im Kontext der Smart City. Es wird ein Werkzeug entwickelt, mit dem die Umgebung, z.B. ein Stadtzentrum, mit Sensoren erfasst und in digitale Würfel mit unterschiedlichsten Eigenschaften zerlegt wird. Diese Würfel können dann genutzt werden, um Informationen und Handlungsbedarfe an die reale Welt zurückzugeben. Auf der Hannover Messe zeigen wir verschiedene Anwendungsfälle. Vom sensorischen Lastenrad über die Unterstützung von Rettungsdiensten bis hin zu ausgewählten AR-Anwendungen können Sie 5GAPS an unserem Stand hautnah erleben.
Visualisierung:
Die aus den Sensordaten erstellte digitale städtische Zwillingsumgebung wird mit Millionen von Würfeln dargestellt und steht je nach Anwendungsfall für verschiedene Interaktionen innerhalb einer Webanwendung zur Verfügung, z. B. für Rettungseinsätze oder Parkraummanagement. Die Nutzer können die urbane Umgebung rund um die Halle 9 der Hannover Messe betrachten. Zusätzlich werden notfallrelevante Objekte und Informationen, wie z.B. Hydrantenstandorte, deren Typen, Wassermengen und spezifische IDs, sowie die Standorte von Rauchsensoren innerhalb der Halle dargestellt. Die Webanwendung signalisiert und visualisiert im Notfall auch spezifische Informationen zu Rauchsensoren, wenn ein Rauchsensor Rauch detektiert hat, und stellt einen kürzesten Weg für die Feuerwehr dar. In einer anderen Anwendung können mit der voxelbasierten Stadtdarstellung aktuell verfügbare Parkplätze visualisiert werden. Die Möglichkeit der in Echtzeit aktualisierten voxelbasierten städtischen digitalen Zwillingsanwendung eröffnet neue Horizonte für die Entwicklung von Smart Cities.
Lokalisierung:
Wir haben auf der Hannover Messe auch die Indoor-Lokalisierung vorgestellt. Unser Lokalisierungsansatz beinhaltet den Einsatz von Lidar in zwei verschiedenen Szenarien innerhalb einer Messehalle. Die erste Messung, die im leeren Zustand der Halle durchgeführt wird, dient als Referenzkarte. Die zweite Messung erfasst die dynamische Umgebung mit Ständen und Objekten, um die Lokalisierung und Kartenaktualisierung zu ermöglichen. Unser Ziel ist es, mit Hilfe dieser Messungen ein flexibles Indoor-Lokalisierungssystem zu entwickeln, das auch bei wechselnden Umgebungsbedingungen gut funktioniert.
Beteiligte ZDIN-Einrichtungen
- Hochschule Hannover
- Leibniz Universität Hannover
Beitrag
- Art des Beitrags: Exponat
- Datum: 22.04.2024
- Ort: Hannover
Technologiedemonstratoren



Transfer-Workshops
Die Deutsche Bucht zählt zu einen der meistbefahrenen Seegebieten weltweit. Die Steuerung und Beobachtung des Verkehrs ist daher ein wichtiges Werkzeug, um die Leichtigkeit, Sicherheit und Effizienz des Verkehrs zu ermöglichen. Um Innovationen für eine zukünftige grüne digitale Welt entwickeln zu können, müssen die aktuellen Abläufe und Herausforderungen bei der Steuerung des Verkehrs analysiert werden. Diese konnten bei der Besichtigung einer Verkehrszentrale in Hamburg beobachtet und untersucht werden. In Gesprächen mit den Operateuren vor Ort konnten zudem Herausforderungen und Grenzen der Abläufe gefunden werden. Dabei stellen beispielsweise die meist noch händische Optimierung und die geographischen Einschränkungen, wie die Tide oder wenig Platz zum Drehen großer Schiffe, eine Rolle. Diese Erkenntnisse wurden bei der kontinuierlichen Anpassung der Zukunftsszenarien und den Voraussetzungen zur Erreichung der Szenarien eingearbeitet.
Workshop
- Datum: 21.11.2024
- Ort: Hamburg
Fort- und Weiterbildungen
- Prof. Dr.-Ing. David Inkermann (Technische Universität Clausthal, Lehrstuhl für Integrierte Produktentwicklung)
- Angebotsart: Seminar
- Datum: 19.11.2024
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
- Angebotsart: Workshop
- Datum: 23.10.2024
- Prof. Dr.-Ing. David Inkermann (Technische Universität Clausthal, Lehrstuhl für Integrierte Produktentwicklung)
- Angebotsart: Seminar
- Datum: 22.10.2024
- Prof. Dr.-Ing. Axel Hahn (Deutsches Zentrum für Luft- und Raumfahrt (DLR))
- Angebotsart: Sonstiges
- Datum: 15.10.2024 - 15.02.2025
- Prof. Dr.-Ing. David Inkermann (Technische Universität Clausthal, Lehrstuhl für Integrierte Produktentwicklung)
- Angebotsart: Seminar
- Datum: 25.06.2024
Studienabschlussarbeiten
- Matthias Steidel
- Prof. Dr.-Ing. Axel Hahn (Deutsches Zentrum für Luft- und Raumfahrt (DLR))
- Art: Master
- Themencluster: Modellierung und Simulation
- Datum: 13.10.2024
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
- Art: Master
- Themencluster: Vertriebsmanagement
- Datum: 02.10.2024 - 02.04.2025
- Prof. Dr. David Woisetschläger (Technische Universität Braunschweig, Institut für Automobilwirtschaft und Industrielle Produktion)
- Art: Master
- Themencluster: Mobilitätsdienstleistungen
- Datum: 26.08.2024 - 26.01.2025
- M.Sc. Volkan Kizgin (Technische Universität Braunschweig, Institut für Konstruktionstechnik)
- Art: Master
- Themencluster: Modellierung und Simulation
- Datum: 15.07.2024
- M.Sc. Volkan Kizgin (Technische Universität Braunschweig, Institut für Konstruktionstechnik)
- Art: Master
- Themencluster: Modellierung und Simulation
- Datum: 05.07.2024