











Ausgezeichnet als
NEWSLETTER ABONNIEREN
Sie interessieren sich für die Projekte und Ergebnisse unserer Zukunftslabore? Unser Newsletter fasst die wichtigsten Ereignisse alle zwei Monate zusammen.
Jetzt anmeldenDie Vision des autonomen Fahrens treibt Technologie- und Automobilhersteller auf der ganzen Welt an. In den USA gibt es erste autonome Flotten, die Fahrgäste selbstständig abholen und zu ihrem Zielort bringen. Die Fahrzeuge sind inzwischen in der Lage, auch schwierigere Verkehrssituationen zu meistern. Dennoch gibt es inoch Sicherheitslücken und Defizite in der Technik, sodass die komplette Umstellung auf einen autonomen Verkehr weiter in die Zukunft rückt.
Die Entwicklung autonomer Fahrzeugsysteme ist sehr komplex. Die Wissenschaftler*innen des Zukunftslabors Mobilität nutzen für die Entwicklung der Fahrfunktionen das V-Modell: Der Entwicklungsprozess beginnt mit einer allgemeinen funktionalen Beschreibung, die nach und nach weiter verfeinert wird, bis sie in eine detaillierte technische Spezifikation und die Grundlage für die Umsetzung übergeht. Nach der Implementierung erfolgt die Überprüfung der zuvor definierten Spezifikationen. Dadurch soll sichergestellt werden, dass die praktische Umsetzung den Anforderungen entspricht. Dieses Vorgehen erzeugt die visuelle Darstellung eines „V“, bei dem jeder Entwicklungsstufe auf der linken Seite die passende Testphase auf der rechten Seite gegenübersteht.
Um die Funktionsfähigkeit von Software-Systemen zu prüfen, ist Testen maßgeblich. Aber die Tests garantierten nicht, dass das System fehlerfrei ist, weil Testen nicht vollständig sein kann. Demnach kann das Testen die Anwesenheit von Fehlern sicherstellen, aber nicht die Abwesenheit. Es bleibt also eine gewisse Wahrscheinlichkeit, dass das System fehlerhaft ist. Je mehr Künstliche Intelligenz in Fahrzeugsystemen verwendet wird, desto schwieriger werden die Tests. Deshalb arbeiten wir im Zukunftslabor Mobilität an einem doppelten Netz. Neben der klassischen Absicherung – dem Testen von Funktionen – forschen wir daran, das Fahrzeugsystem während der Betriebszeit zu überwachen.

Künstliche Intelligenz (KI) wird eingesetzt, um die Informationen aus der Umgebung des automatisierten Fahrzeugs zu erfassen. Mittels KI nimmt das Fahrzeug mithilfe von Sensoren Objekte in seiner Umgebung wahr, z. B. Gebäude, Personen, andere Fahrzeuge, Infrastruktur. Diese Informationen werden anschließend ausgewertet. Die KI lernt in ihrer Trainingsphase diverse Objekte in verschiedenen Szenarien kennen. Dennoch ist es nicht möglich, alle hypothetisch möglichen Fahrsituationen während der Entwicklung des KI-basierten Wahrnehmungssystems zu berücksichtigen. Denn dies würde Unmengen an Datenverarbeitung und Rechenleistung erfordern. Deshalb bleibt ein gewisses Risiko bestehen, dass die KI während der Fahrt Informationen über ihr noch unbekannte Situationen erhält, die sich nicht auswerten kann. Wenn z. B. in den Trainingsdaten nur stehende oder laufende Menschen enthalten waren, würde die KI eine Person, die am Boden liegt, nicht als Mensch erkennen, sondern eventuell als eine Fahrbahnmarkierung.
Überprüfung der Funktionen während der Betriebszeit
Ziel der Wissenschaftler*innen ist es, Unsicherheiten von KI-basierten Systemen zur Umgebungswahrnehmung rechtzeitig zu erkennen und das automatisierte Fahrzeug in einen sicheren Zustand zu bringen. Der grundlegende Ansatz der Wissenschaftler*innen besteht darin, die Funktionen des autonomen Fahrzeugs auch während der Betriebszeit zu überwachen. Dafür entwickelten die Wissenschaftler*inne zwei Monitoring-Systeme: ein funktionales Monitoring und ein situatives Monitoring.
Das funktionale Monitoring überprüft, ob die Funktionen des Fahrzeugs korrekt sind, also ob sich das System während der Betriebszeit in einem sicheren Zustand befindet. Für die Erfassung der Umgebung kommen unterschiedliche Sensoren zum Einsatz und es kann vorkommen, dass die Objekterfassung der Sensoren nicht übereinstimmt (z. B. erfasst die Kamera ein Tier auf der Straße, der LiDAR-Sensor aber nicht). Das funktionale Monitoring erkennt, dass es sich hier um eine ungewisse Situation handelt und bringt das Fahrzeug in einen sicheren Zustand (z. B. durch eine Notfallbremsung). Um das funktionale Monitoring zu prüfen, entwickelten die Wissenschaftler*innen Prototypen und testeten diese auf einem realen Versuchsträger. Die Tests bestätigten, dass das funktionale Monitoring Inkonsistenzen (z. B. bezogen auf die Anzahl der Objektklassen oder die jeweilige Klasse der Objekte) zwischen mehreren redundanten Wahrnehmungssystemen (jeweils LiDAR- und Kamera-basiert) auf dem Versuchsfahrzeug erfasst.
Das situative Monitoring adressiert die KI-Funktionen: Das situative Monitoring prüft, ob die Fahrumgebung in den KI-Trainingsdaten enthalten war. Ist dies nicht der Fall, besteht hohe Wahrscheinlichkeit, dass die KI nur raten und daher nicht korrekt ermitteln kann, was zu tun ist. In diesem unsicheren Fall könnten ebenfalls Notfallmaßnahmen ergriffen werden. Die Wissenschaftler*innen testeten die Funktionsweise des situativen Monitorings. Die Tests bestätigten, dass das situative Monitoring unbekanntes Verhalten einer bekannten Klasse (z. B. liegende Person statt laufender Person) und völlig unbekannte Klassen (Objekte, die im Trainingsdatensatz der KI nicht enthalten waren) erkennt. Für das situative Monitoring meldeten die Wissenschaftler*innen des Zukunftslabors bereits ein Patent an.
Command-And-Control-Center
Für die Tests des funktionalen und des situativen Monitorings nutzten die Wissenschaftler*innen ein Command-And-Control-Center, das die Umgebungserfassung des Versuchsfahrzeuges abbildet. Das Command-And-Control-Center befindet sich an einem Remote-Leitstand, einer Art Kontroll- und Überwachungseinheit, die es ermöglicht, automatisierte Fahrzeuge aus der Ferne zu überwachen und im Bedarfsfall einzugreifen. In Not- oder Ausnahmefällen bringen die zuvor vorgestellten Monitoring-Systeme das Fahrzeug durch Auslösen der Sicherheitsmaßnahmen wie Notbremsung sicher zum Stillstand und melden den Vorfall an das Command-And-Control-Center im Remote-Leitstand. Dies bedeutet, dass Sicherheitsoperator*innen am Leitstand das automatisierte Fahrzeug steuern oder Entscheidungen treffen können, zu denen das System selbst nicht in der Lage ist. Sobald die Sicherheitsoperator*innen das Problem remote gelöst haben, können sie die Fahrkontrolle wieder an das technische Fahrsystem im Fahrzeug übergeben. Auf diese Weise wird die Sicherheits- und Kontrollverantwortung zwischen den menschlichen Sicherheitsoperator*innen (außerhalb des Fahrzeugs) und dem technischen System (innerhalb des Fahrzeugs) verteilt und übergeben.
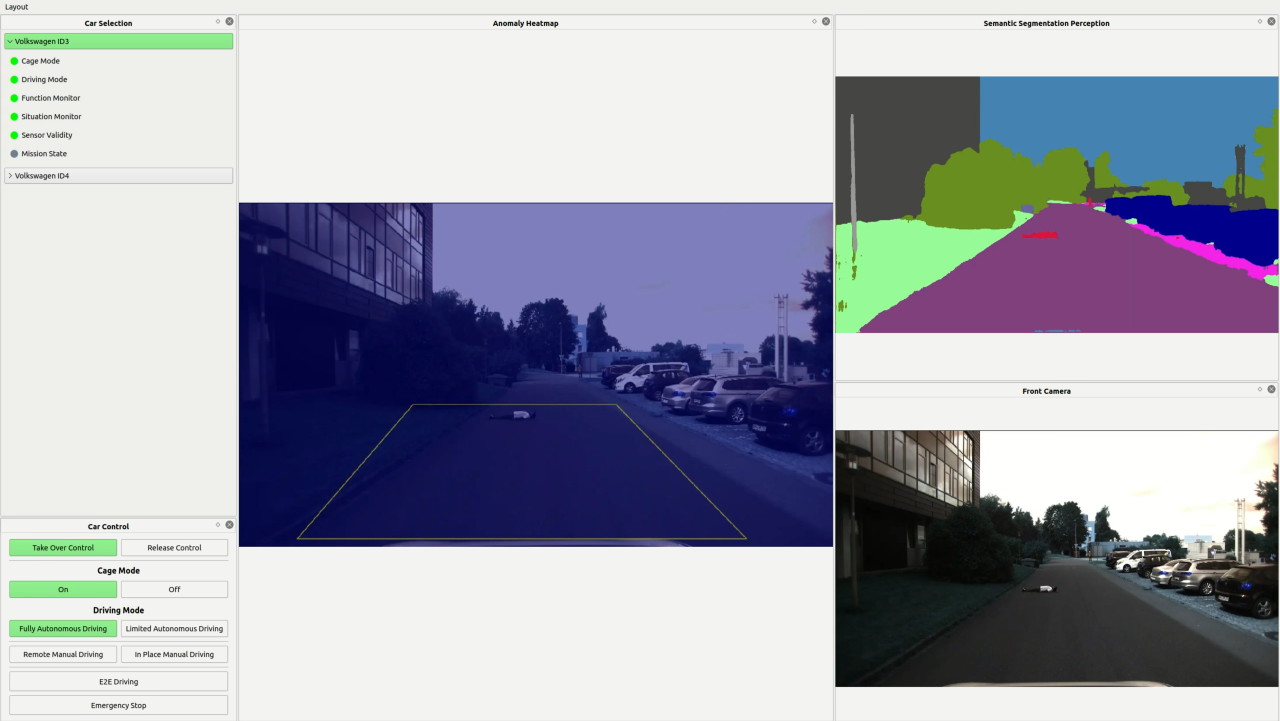
Das gelbe Viereck in der „Anomaly Heatmap“ (Bild links) zeigt den Bereich, der als sicherheitskritisch angesehen wird. Die „Semantic Segmentation Perception“ (Bild rechts oben) stellt die Fahrumgebung dar, die auf Basis der Sensordaten erkannt wurde. Jede Farbe repräsentiert eine semantische Klasse (z. B. violett = Straße). Die „Front Camera“ (Bild rechts unten) zeigt die Sicht der Kamera. In dieser Abbildung wird die liegende Person richtig identifiziert (rot = eigene Klasse).
Ursprünglich konnte das Fahrzeug die Person nicht richtig erkennen, da eine liegende Person normalerweise nicht im Trainingsdaten der KI-basierten Wahrnehmungssystems beinhaltet. Die „Semantic Segmentation Perception“ hatte die Person violett eingefärbt, also als Teil der Straße erkannt. Das situative Monitoring hatte diesen sicherheitskritischen Fall erkannt und eine Notbremsung ausgelöst. Die Wissenschaftler*innen nutzten die Daten zur Weiterentwicklung/Training des Wahrnehmungssystems.
Intelligentes Logistiksystem zur Entlastung des Straßenverkehrs
In einem anderen Forschungsgebiet nutzen die Wissenschaftler*innen ebenfalls KI, um Mobilitätsdaten auszuwerten. Konkret geht es darum, ein effizientes Transportsystem von Personen und Gütern zu schaffen, das Emissionen reduziert und den Straßenverkehr entlastet. Die Wissenschaftler*innen entwickelten ein Logistiksystem, das auf einer KI-basierten Tourenplanung basiert und selbstorganisierende Lieferboxen für den Gütertransport nutzt. Ein Bespiel veranschaulicht die Nutzung und Funktionsweise dieses Logistiksystems: Personen, die eine Strecke mit dem PKW, Bus, Zug oder Fahrrad planen, tragen dies in eine App ein. Personen, die Güter transportieren lassen möchten, tragen diesen Auftrag ebenfalls in die App ein. Ein Algorithmus kombiniert die geplanten Fahrten mit den Transportaufträgen und ermittelt, welche Personen welche Güter mitnehmen können. Die Güter werden zu einer Station gebracht – ähnlich wie die Packstation der Deutschen Post – und dort in intelligente Logistikboxen gelegt. Die Personen, die eine Fahrt antreten, können die Logistikboxen aus der Station abholen und zur nächsten Station bringen, die auf ihrem Weg liegt. Es ist möglich, dass eine Person die Box direkt zum Zielort bringt oder dass die Box von mehreren Personen zum Zielort geliefert wird. Die Routen- und Transportplanung geschieht ebenfalls KI-basiert.
Bei diesem Projekt standen wir vor unterschiedlichen Herausforderungen: Zum einen sind die Randbedingungen nicht stabil, da sich die Tage, Fahrtzeiten und Routen der Nutzer*innen variabel ändern können. Dadurch müssen die Fahrten der Personen mit den angefragten Gütertransporten immer wieder aufs Neue ermittelt werden. Zum anderen müssen manche Güter innerhalb eines festen Zeitfensters transportiert werden, wenn es sich z. B. um verderbliche Lebensmittel oder medizinische Güter handelt. Daher haben wir ein KI-basiertes Prognosesystem entwickelt. Dies sagt voraus, wie wahrscheinlich es ist, dass die Waren bis zur eingegebenen Deadline transportiert werden können. Außerdem ermittelt das Prognosesystem, ob vermutlich noch weitere Aufträge zu einer bestimmten Route dazu kommen werden, sodass es sich z. B. lohnen würde, mit der Fahrt noch eine gewisse Zeit zu warten.
Die Logistikboxen sind ausgestattet mit GPS-Trackern (zur Ortung), mit Thermometern (für die Temperaturmessung bei verderblichen Gütern), mit Öffnungssensoren (zur Überprüfung, wie häufig die Box geöffnet wurde) und mit der Block-Chain-Technologie (um Transaktionen zwischen den Transporteur*innen zu dokumentieren). Die Wissenschaftler*innen entwickelten diese intelligenten Boxen und die dazu gehörige App.
Neben dem Gütertransport können Nutzer*innen des Systems auch Personenbeförderungen anfragen, wie bei einer Mitfahrgelegenheit: Personen tragen ihren Zielort und die Ankunftszeit in die App ein und der Algorithmus ermittelt, ob ein*e andere*r Nutzer*in die Person mitnehmen kann. Das Ziel besteht also darin, möglichst viele Waren und Personen mit möglichst wenig Fahrten zu transportieren. Dabei werden mehrere Transportmittel kombiniert (Intermodalität). Die Bezahlung basiert auf einem Punktesystem: Nutzer*innen, die Personen oder Güter transportieren, erhalten Punkte und können diese für eigene Transportanfragen ausgeben. Das Logistiksystem wird bereits von einem Mobility-on-Demand-Anbieter aus Neustadt eingesetzt.
